|
正弦控制是达到这些目标的最佳方式,但相对于更为传统的梯形控制技术,这种控制则会增加成本和复杂性。本文将讨论 BLDC 电机控制的基本原理,以及使用正弦控制而不是梯形控制的原因。
本文还将介绍一些现成的商业解决方案,包括集成式电机驱动器和控制器芯片等形式,这些方案可用于更加轻松地过渡到正弦控制并加快设计流程。
BLDC 电机基本原理
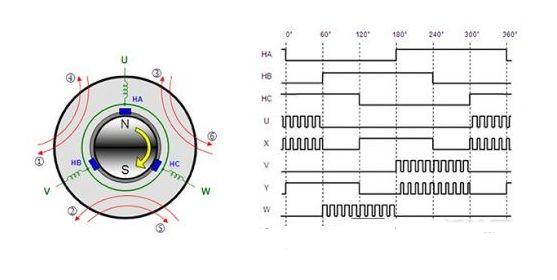
BLDC 电机通过反向电机设置消除了使用机械换向器的要求;绕组成为定子,永磁体成为转子的一部分。绕组通常由使用脉冲宽度调制 (PWM) 控制的六 MOSFET 电桥供电,它们按照控制次序进行转向,产生旋转磁场,从而“拖拽”围绕它的转子并驱动相连的负载(图 1)。
换向由转子和定子的相对位置确定,具体则通过霍尔效应传感器测量,或通过电机转动时生成的反电动势 (EMF) 幅度测量(限无传感器电机)。
目前有三种电子换向控制方案:梯形、正弦和磁场定向控制 (FOC)。FOC 实现成本高,专用于高端应用,因此本文不做讨论。
对于许多应用,梯形控制的 BLDC 电机是最佳解决方案。这类电机结构紧凑、性能可靠,且价格也在迅速下降,因此尤其适合许多小型电机应用,包括汽车、白色家电和计算机。
此外,梯形技术最容易实现,因此也最受欢迎。电机每相由直流供电,每 60˚ 进行换向。相位驱动为“高”、“低”或保持浮动状态。
理论上,这样的系统可产生平滑、恒定扭矩。实际上,特定相位的电流不可能瞬间由低转为高。相反,所导致的上升时间在输出中生成与转向定时一致的波纹(图 2)。
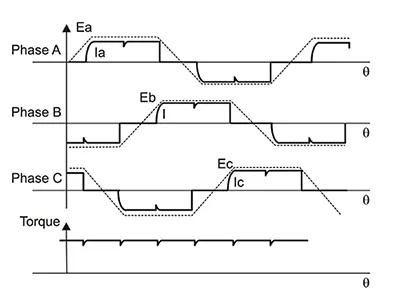
转矩波动不是梯形控制 BLDC 电机的唯一缺点。另一个缺点是电气和声学噪声。一个重要的噪声来源就是为每个相位供电的快速切换直流电流。从电气角度来说,这种噪声会加热绕组并降低效能。从声学角度来说,开关频率及其谐波产生的“嗡嗡”声音频率虽然不是很大,但十分刺耳。
实施正弦控制
正弦控制十分复杂,很少有工程师可以仅借用基本原理就实现系统。一个更好的方法就是利用芯片供应商的知识 BLDC 电机设计开发套件。NXP 的 FRDM-KE04Z 就是一个例子。
它利用 Kinetis KE04 ARM® Cortex®-M0 MCU 运行正弦算法。由于控制电路设计基于一种普通的 BLDC 驱动器芯片,因此进一步减轻了实现难度。这些设备通常将 PWM 控制和电力电子器件集成到一个芯片,并提供外部 MCU 的接口。其他设备集成 MCU,仅需一些额外的无源元器件就可以形成完整电路。
正弦替代方式:“鞍形”图
实践中极少使用纯正弦驱动电压,因为相对于接地而言,为每个电机端子生成电压的效率很低。一个更好的方法就是在相位间生成正弦差分电压,相位偏移 120˚ 进行换向。实现方式是通过使用“鞍形”图(而不是正弦)改变相对于接地的 PWM 占空比(以及驱动电压)(图 3)。随后,驱动电机的相电流就遵循相间电压的纯正弦波变化。
鞍形图方法有两个优点:第一,所产生的最大差分电压要高于纯正弦信号所能产生的电压,因而给定输入的扭矩和速度也更大。第二,每个端子 1/3 时间输出为零,进一步减少了功率级中的开关损耗。
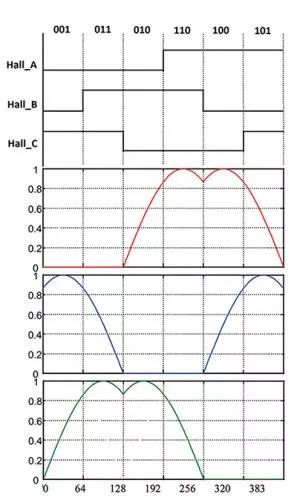
正弦控制方法的一个复杂之处在于:根据形成鞍形电压输入所必需的电机角度来精确控制占空比。这在高速旋转时甚至变得更加困难。挑战主要在于每转只能精确确定电机位置六次,而转子的其中一个磁极经过三个霍尔传感器中的一个。例如,FRDM-KE04Z 常用的解决方案是将电机角速度乘以 ∂T 并假定电机速度恒定,从而估算霍尔传感器之间的电机角度 (“mtrAngle”)。
然后使用查询表确定特定角度的 PWM 占空比。在 FRDM-KE04Z 中,查询表为电机旋转的每个角度(实际 384 个增量)提供占空比。
此类方法利用了使用鞍形图的附带影响。特别说明:由于特定相位的电压值在三分之一时间内为零,这段时间不需要查询,因而需要的处理器资源更少,并允许在应用中使用更普通的低成本 MCU。
这种方法的缺点是启动阶段电机快速加速时,霍尔传感器之间的电机速度插值很可能不精确。这会导致扭矩响应不平稳。
针对这一问题,ROHM Semiconductor 的 BD62011FS 风扇电机控制器采用的一种常见解决方案是:以梯形控制模式启动电机,在达到特定速度(通常 5 - 100 Hz)后切换到正弦控制,此时插值的精确度更高。
Rohm 的设备主要针对配备霍尔传感器的 BLDC 电机的控制。芯片采用高压侧和低压侧 MOSFET 的 PWM 控制和正弦换向逻辑。它可在 10 到 18 V 输入范围内运行,并提供介于 2.1 和 5.4 V(最高 1 W)的输出范围。目标应用包括空调、水泵和白色家电。
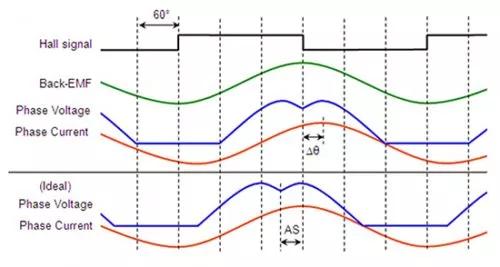
另一个设计挑战是给定相位驱动电压和产生的正弦波电流之间的相位延迟,通常发生于非补偿型 BLDC 电机。电机可正常运行,但效能将降低,这会首先挫败实现正弦控制方案的目标。这种效能低下的原因不是驱动电压和相位电流之间的相位延迟,而是相位电流和正弦反电动势之间的相位延迟。
幸运的是,许多驱动芯片,包括 ON Semiconductor 的 LV8811G 功率 MOSFET 驱动器,允许设计人员在正弦驱动电流中引入超前相角,从而确保其峰值与反电动势的峰值一致。超前相角通常设为随输入电压线性增加,而电压决定电机速度(图 4)。
LV8811G 是三相 BLDC 电机驱动器,由单个霍尔传感器控制并采用正弦控制。直接 PWM 脉冲输入或直流电压输入都可用于控制电机转速。
使用 LV118811G 时,设计人员可通过引脚 PH1 和 PH2 上的分压电阻器来设置初始条件:相角开始超前的速度和超前相角斜坡的梯度。之后芯片的内部逻辑根据预定公式确定给定速度的超前相角。
无传感器 BLDC 正弦控制
正弦控制还可通过无传感器的 BLDC 电机实现。这些电机的运行方式与使用霍尔效应传感器的电机相似,除了位置信息是通过测量反电动势获得。
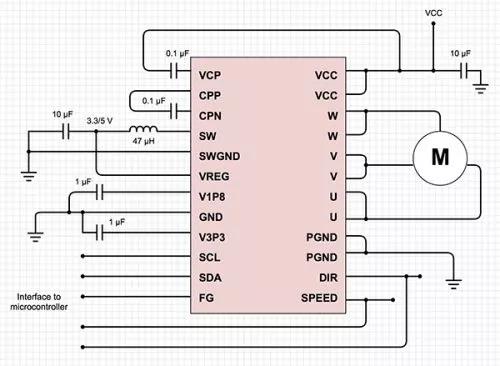
例如,Texas Instruments 的 DRV10983 就是设计用于无传感器的 BLDC 电机的正弦控制。芯片集成电力电子器件,可以连接外部 MCU 并提供高达 2 A 的连续驱动电流。正弦控制通过使用公司的专有控制方案来实现。
在该方案中,换向控制算法连续测量电机相电流并定期测量供电电压。然后,设备使用该信息计算反电动势和电机位置。电机速度由单位时间内一个相位的反电动势的过零次数确定。芯片还允许超前相角,以调整相电流和反电动势,从而实现最大效能。
DRV10983 是专门设计用于成本敏感、低噪声、低外部元器件计数的应用(图 5)。
总结
BLDC 电机由于性能和可靠性的优势,正逐渐成为传统有刷型电机的替代产品。对于许多应用,梯形控制可满足使用预期,但如果设计人员的任务是提高效能、减少电气和声学噪声并提高扭矩传递,则应考虑正弦控制。
虽然正弦控制增加了复杂度和成本,但开发工具、功能性 MCU 以及集成驱动器 IC 已大大简化了设计流程,使正弦控制更加实用简单。不仅如此,开发工具的灵活性和驱动器 IC 的适应性使设计人员能够精调应用的电机,并更多关注产品差异化方面。
|