|
什么是有感?
在有感无刷中的有感是指“霍尔传感器”,那么什么是“霍尔”呢?霍尔是指的霍尔效应,这一现象是美国物理学家霍尔(A.H.Hall,1855―1938)于1879年在研究金属的导电机构时发现的。当电流垂直于外磁场通过导体时,在导体的垂直于磁场和电流方向的两个端面之间会出现电势差,这一现象便是霍尔效应。这个电势差也被叫做霍尔电势差。简单来说,就是通过霍尔传感器,无刷驱动器可以明确知道无刷电机的转子的位置。
什么是无感?
在无感无刷中的无感是指“无霍尔传感器”,在没有直接反馈的情况下,无感无刷电机只能通过间接方式获取电机转子位置,常见的方法有反电动势法、电感法、磁链法、高频脉冲法及其它智能方法,应用最多的是反电动势法。
无感无刷电机在启动时因为不知道转子磁极方位,只能随机变换电流去驱动电机,相似于“蒙”,总有一个时分转子会滚动起来,而转子滚动起来之后,就能靠线圈上的电流改变来核算转子的方位,然后操控电流与方向。这就是为什么无感无刷在起步时,总是有“咔咔咔"的症状。
与有感无刷则不同,有了传感器,驱动器从一开机就知道转子磁极方位,直接就能给对应的线圈供给对应的电流,以驱动转子。可是电流很小时,电机就会发出持续的"吱吱吱"的声响。这就是为什么有感电机在低速时会听到持续地"吱吱吱"的声响,而无感无刷则不会。
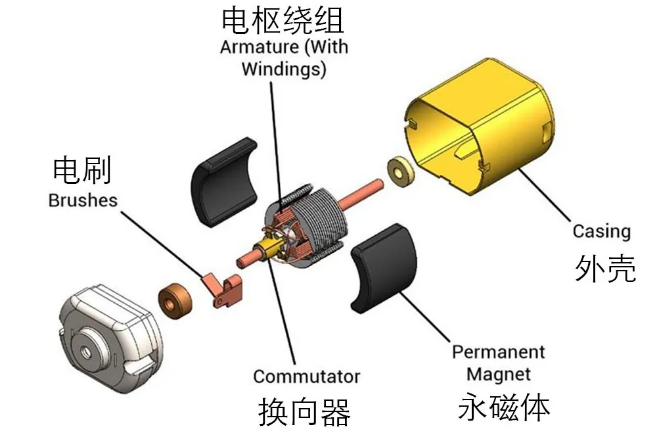
内部结构图
有感无刷的优缺点
优点:电机的线性更佳,速度稳定性强,响应性高。
缺点:造价高,且不容易做防水。受霍尔传感器局限,容易受到干扰,让驱动器接收到错误信息而导致故障,故而驱动器到电机的线长限制一般在5米以内。
无感无刷的优缺点
优点:没有传感器,成本更低,线长不因霍尔因素影响而受到限制。
缺点:线性不如有感无刷电机,另外在市面上的驱动器因为转速没有准确的反馈,误差会在±20转以上。带载、满载启动容易抖动或启动失败。
有刷电机与无刷电机调速方式的区别
实际上两种电机的控制都是调压,只是由于无刷直流采用了电子换向,所以要有数字控制才可以实现了,而有刷直流是通过碳刷换向的,利用可控硅等传统模拟电路都可以控制,比较简单。
1、有刷马达调速过程是调整马达供电电源电压的高低。调整后的电压电流通过整流子及电刷地转换,改变电极产生的磁场强弱,达到改变转速的目的。这一过程被称之为变压调速。
2、无刷马达调速过程是马达的供电电源的电压不变,改变电调的控制信号,通过微处理器再改变大功率MOS管的开关速率,来实现转速的改变。这一过程被称之为变频调速。
|

